軽量なUHFアンテナを回すのに大きなローテータは必要ないので、小さなローテ―タを作ってみました。
以前所持していたエモテータの使用感をそのままにと思い、手元のコントローラはジャンク品を入手して内部を改造してます。
モーター部もジャンク品のギャドモータを入手しました。 本来の用途は不明ですが自動車関連部品のようです。
・主な機能
1)電源:DCアダプター 9.5V
2)回転速度:360度で10秒〜21秒の4段階(コントローラ背面にスイッチ)
3)360度回転時のリミッタ回路でモーター回転自動停止付き
4)強風による360度以上の異常回転阻止ストッパあり
 |
完成したローテ―タです。 回転部、コントロール部、ケーブル(7.7m)です。 |
 |
回転部の蓋を開けて背面から見たところ |
 |
回転部を上部から見たところ クラッチ部は水道用のVP20と30のキャップを利用しました。 内部は床用シートです。厚1.5ミリ |
 |
メーターには距離に応じた方面別の市町村名を印刷しました。 前面に電源ランプ付けました(本来は無かった) 本来のメータは交流10Vの電圧計でしたが、内部の整流器と抵抗器を外して電流計(850μA)として利用しています。 画像は南を指しているところ (南を中心に左右180度回す作りです) 塗装は自動車用で再塗装してみました。 |
 |
コントローラ背面に速度切り替えスイッチ(4段階)と メーター設定半固定ボリューム調整穴があります。 |
![]() リミッタ―、位置センサ、クラッチ等のアップ画像
リミッタ―、位置センサ、クラッチ等のアップ画像

コントローラ内部の様子です。
メーターとマイクロスイッチは流用です。

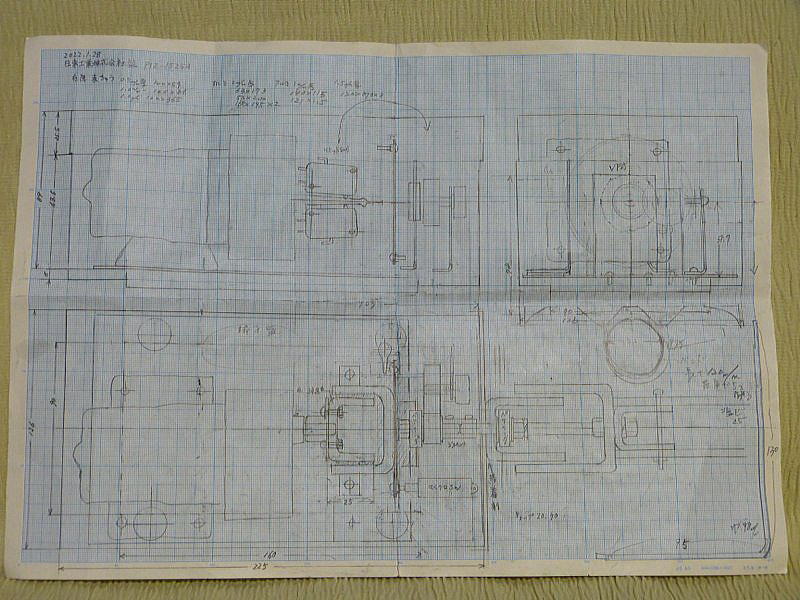
![]() メカ図面
メカ図面
制作して行くうちに若干、配置などがいろいろ変わりました。
モーター軸にクラッチ機能を持たせて不要な負荷によるギヤ破損が起きないようにしました。
アンテナ自体の垂直荷重はモーターに掛からない構造としました。
![]() 回路図
回路図
コントローラ部は元々あったパーツ(メーター、左右スイッチ、背面コネクタ)を流用しています。
背面にあった、フルスケールADJ用VRは基板用半固定VRに変えて背面の穴から調整できるようにしました。
元々あったADJ用VRの穴には速度選択SW(4段階)を差し込んでいます。
モーターは直流のプラス・マイナスを反転させます。 また、リミッタSWを備えます。
回位置センサーはBタイプの5KΩVRです。
VRは約300度の回転ですが、回転初めの約30度は直線性が悪く使えません。
それを補正する為、メーターの電源オフ時の針の始点は0以下の位置に設定しておきます。
モーターの回転の360度をギヤダウンして約186度の回転をVRに伝えてます。
ギヤダウン用のプラギヤはラジコン自動車のギヤを利用しました。

![]() ローテ―タの取り付け
ローテ―タの取り付け
2022年3月1日 取り付け作業を行いました。
既存の144/430Mのディスコーンアンテナの上部に430Mのループアンテナを配置する
予定です。
現在のディスコーンアンテナは2階ベランダから伸ばして、地上高は7.6mです。
ループアンテはこれより約60cm上に離し、地上高8.3mの位置の予定です。
ローテ―タの上部には塩ビパイプVP25(2m)とVP20(1m)の計3mを接続します。
パイプ自体の重量は1.2kg程でループアンテナ込みで約2kgになるのではないと思ってます。
ローテ―ター自体への垂直荷重を避けるために塩ビケースとベアリングで受け止める工夫をしてます。
塩ビパイプの3mは並行する既存の塩ビパイプ(VP25)へ真鍮金具で掛けるのみで付け外しを容易にしてます。
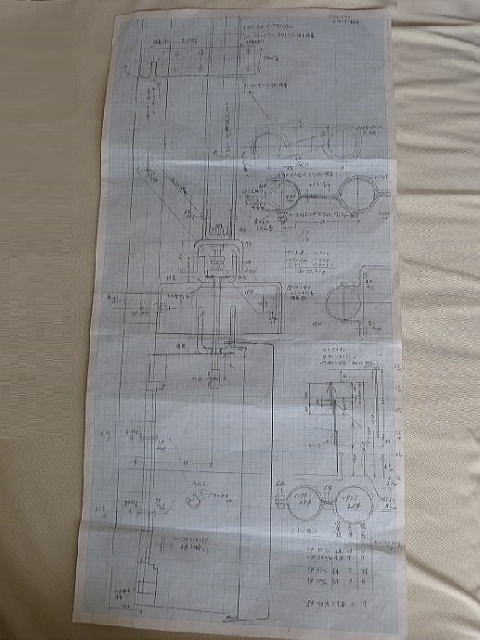
![]() 取り付け図面
取り付け図面
ローテ―タの位置は2階ベランダの物干し場の下です。
取り付けには既存の塩ビパイプVP25に沿わせる形です。
ローテ―タの取り付け高さはメンテナンス性を考えて目線当たりにしました。
ローテ―タを取り付けるのにわざわざ図面など書かなくても出来るだろうと思ってましたが
そうも行かず、落書きやら検討の連続で、詳細の図面が出来上がりました。
 |
作業前に部材を撮影しました。 画像の右上部の部材は既存の塩ビパイプに引っ掛けるものです。 新たなVP25パイプを通しますが回転を円滑にする為、金具は緩めにして内側に敷居スベリを巻き付けてます。 ローテ―タボックス内への雨漏り防止シーリングもやっています。 |
 |
垂直荷重を受け止める部材です。 塩ビパイプキャップ VP30、20、16とベアリング、ワッシャー、6φロングネジです。 VP16以外は長さをカットしてます。 手持ちのベアリングの内径は9φだったので6φに合わせる為、0.5ミリ厚銅板を丸めて半田上げしてリングを作ってます。 本来のベアリングの使い方ではありません。 |
 |
取り付けた様子です。 既存の塩ビVP25パイプにおんぶする様に取り付けてます。 ローテ―タ自体に垂直荷重は掛からないようにしてるのでズリ落ちない程度の取り付けと、本体が回転しないような付け方をしてます。 |
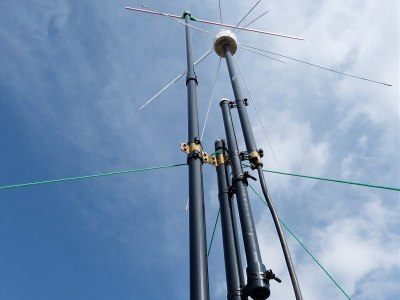 |
下から見上げたところです。 上部にダミーのプラ棒を着けてみました。 異径パイプの接続部分は未だ接着していません。 |
 |
少し離れた場所から撮影しました。 ローテ―タによる回転は良好に動作しました。 既存のディスコーンアンテナのエレメントの途中を塩ビパイプ(VP20)が突き抜けていますが、SWRには変化もないようなので影響は今のところ無いようです。 |
![]() 後書き
後書き
手元のコントローラを操作すると以前、所持していたエモテータと動作が同じでした。
回転速度は小型アンテナですので速度を上げても、大丈夫ではないかと思います。まだ想定です。
このローテ―ターはまだ実際にアンテナに設置してないので、実用になるか不明です。
気になるトルクですが、モーター自体は2kg/cmと明記してますが、それは最低電圧の5.5V時ではないかと思ってます。
実際、モータへの電圧を上げていくとトルクは強くなり、手では止められない程になります。
その為、電圧を変えられるようにしてみました。
モータへの最大電圧は36Vなので、かなり余裕はありそうです。
クラッチのスリップする強さはネジで調整可能です。
実際のアンテナを実装した時はスリップ寸前くらいにしてギヤ破損を防止します。
アマ無線のページに戻る




